| Deutsch English |
![]()
YOU LEARN HERE... |
how to prepare the Calliope for programming with WebTigerPython and how to run your first programme with your Callibot. |
PROGRAM DEVELOPMENT |
Assemble the Callibot according to Knotech's instructions. You write a programme for the Callibot in the browser on a computer and download it to the Calliope via a USB cable, where it is executed. To do this, the Calliope must have firmware installed. The firmware is already installed on a new Calliope. If this is not the case, you must install the firmware.. |
USB CONNECTION |
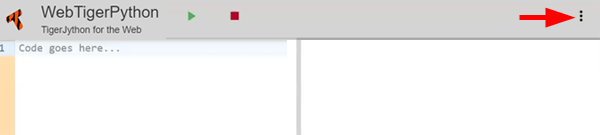
A. Use Chrome browserStart WebTigerPythonadvantageously with the Chrome browser. This supports WebUSB and access to the micro:bit from the browser. Select Device - Calliope mini 3 or Callliope mini 1/2 under the three dots at the top right.
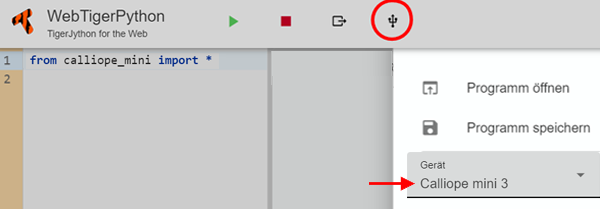
Click on the USB symbol in the title bar and then on ‘Calliope mini 3 CMSIS-DAP’ and select Connect.
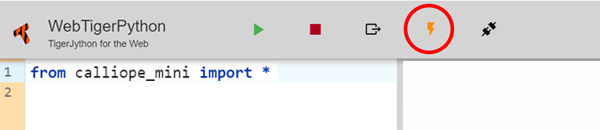
The Calliope is now connected to your computer. A new yellow button will appear in the title bar, which you can use to download the programme.
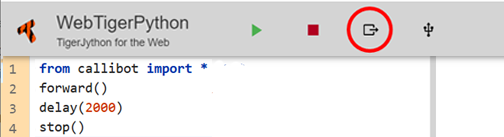
To test, enter a programme for the Callibot in the editor window: from callibot import * forward() delay(2000) stop() Click on the yellow button to download the programme to the Callliope and run it. The robot moves forwards for 2 seconds (2000 milliseconds).
B. Using other browsersIf you are using a browser other than Chrome, you must first download the programme prepared for the Callibot to your computer and then copy (move) it to the MINI drive. Start WebTigerPython and select Robotics and device Calliope mini 3 or Calliope mini 1/2. Enter a test programme for the Callibot in the editor window and click on the Export code button .
You must then enter the programme name (e.g. Ex1). The Ex1.hex file prepared for the Callibot will be downloaded to the download folder on your computer. Switch on the robot's power supply and move the Ex1.hex file to the MINI drive using the mouse. The programme starts automatically and the robot moves forwards for 2 seconds. |
REMIND YOU... |
Enter the programme code in WebTigerPython and establish the USB connection. If you are working with Chrome, use the yellow button for the download, otherwise you must first download the programme to the computer and then move the hex file to the MINI drive. The robot's Calliope must be connected to your computer via the USB cable. Before running it, you must switch on the power supply using the red button on the back of the Callibot. There is a reset button next to the USB socket, which you can use to run the last downloaded programme again as often as you like If you do not need the robot for a longer period of time, you should switch off the power supply with the blue button so that the batteries are not discharged unnecessarily |
![]()