| HomeTurtlegrafikGPanelRobotik WebTigerPython |
| Python - Online |
1. LOSLEGEN
![]()
DU LERNST HIER... |
wie du den Calliope für die Programmierung mit WebTigerPython vorbereitest und wie du dein erstes Programm mit deinem Callibot ausführen kannst. |
PROGRAMMENTWICKLUNG |
| Baue den Callibot nach der Anleitung von Knotech zusammen. Ein Programm für den Callibot schreibst du im Browser auf einem Computer und lädst es über ein USB-Kabel auf den Calliope hinunter, wo es ausgeführt wird. Dazu muss dem Calliope eine Firmware installiert sein. Auf einem neuen Calliope ist die Firmware bereits installiert. Wenn es nicht der Fall ist muss du die Firmware installieren. |
USB-VERBINDUNG |
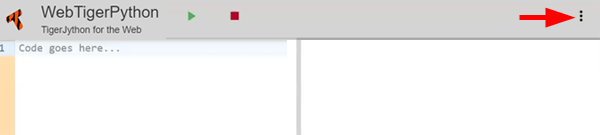
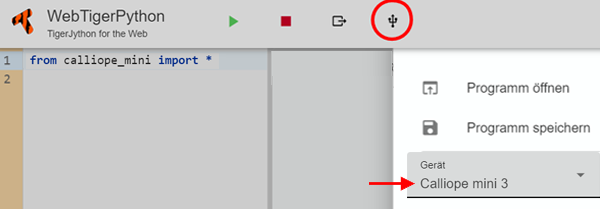
A. Browser Chrome verwendenStarte WebTigerPython vorteilhaft mit dem Browser Chrome. Dieser unterstützt WebUSB und den Zugriff auf den micro:bit aus dem Browser heraus.Wähle rechts oben unter den drei Punkten Gerät - Calliope mini 3 bzw. Callliope mini 1/2.
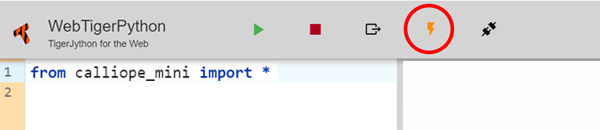
Klicke in der Titelleiste auf das USB-Symbol und dann auf "Calliope mini 3 CMSIS-DAP" und wähle Verbinden.
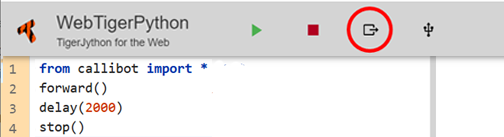
Der Calliope ist jetzt mit deinem Computer verbunden. In der Titelleiste erschein ein neues gelbes Button, welches du zum Programmdownload verwenden kannst.
Zum Testen gibst du im Editorfenster ein Programm für den Callibot ein: from callibot import * forward() delay(2000) stop()
B. Andere Browser verwendenFalls du einen anderen Browser als Chrome verwendest, musst du das für den Callibot aufbereitete Programm zuerst auf deinen Computer herunterladen und dann auf das MINI-Laufwerk kopieren (verschieben).Starte WebTigerPython und wähle Robotik und Gerät Calliope mini 3 bzw. Calliope mini 1/2. Gib im Editorfenster ein Testprogramm für den Callibot ein und klicke auf den Button Code exportieren.
Danach musst du den Programmnamen eingeben (z.B. Ex1). Die für den Callibot aufbereitete Datei Ex1.hex wird in den Download-Ordner auf deinem Computer heruntergeladen. Schalte die Stromversorgung des Roboters ein und verschiebe die Datei Ex1.hex mit der Maus auf das Laufwerk MINI. Das Programm startet automatisch und der Roboter bewegt sich 2 Sekunden vorwärts. |

MERKE DIR... |
Du gibst den Programmcode im WebTigerPython ein und stellst die USB-Verbindung her. Wenn du mit Chrome arbeitest, verwendest du für den Download den gelben Button, sonst musst du das Programm zuerst auf den Computer herunterladen herunterzuladen und dann die hex-Datei auf das MINI-Laufwerk verschieben. Der Calliope des Roboters muss dabei über das USB-Kabel an deinem Computer angeschlossen sein. Vor der Ausführung musst du mit dem roten Button hinten am Callibot die Stromversorgung einschalten. Neben dem USB-Büchse befindet sich ein Reset-Button, mit dem das zuletzt heruntergeladene Programm beliebig oft erneut ausgeführen kannst Falls du längere Zeit den Roboter nicht brauchst, solltest du die Stromversorgung mit dem blauen Button ausschalten, damit die Batterien nicht unnötig entladen werden. |
![]()