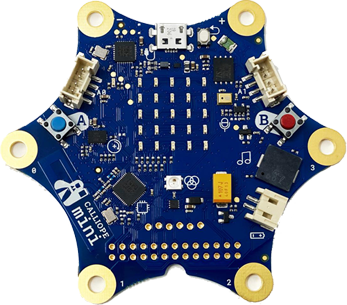
The Calliope is a pocket-sized programmable computer designed for educational purposes.
It consists of an approx. 7 x 7 cm star-shaped circuit board with a 32-bit microcontroller, flash memory, Bluetooth, 25 red LEDs with which you can display simple images and messages, a colour LED, two buttons, a loudspeaker and microphone, a combined position, compass and gyro sensor, as well as an H-bridge for connecting motors.
|
|
 |
 |
|
Additional sensors can be connected via easily accessible pins and two I2C interfaces.
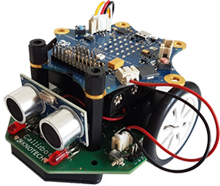
Together with the compact and affordable Calli:bot chassis from Knotech, the Calliope becomes a moving robot that can be used to demonstrate other important robotics concepts. Sample examples and tasks for the moving robot can be found in the Callibot tutorial.
|
The latest Calliope model Calliope mini 3 also has two additional colour LEDs and a USB3 interface. The programmes can therefore be downloaded to the Calliope more quickly. All programmes in this course can also be run with the Calliope mini 3.
Our learning programme uses the web-based Python editor WebTigerPythonand provides you with many executable examples and tasks to solve yourself. We assume that you already know the basic programme structures from the Turtlegrafikchapter. Otherwise we recommend that you work through the Python Crash Course first.
However, the online version does not completely replace the locally installed TigerJython development environment. This also has a Calliope simulation and some additional tools. However, the programme codes are compatible. The programmes created online can be further processed with TigerJython without any problems. You can find a learning programme on robotics with Callibot using TigerJython at tigerjython4kids.ch/calliope. |