| Deutsch English |
![]()
SCHWARM SIMULATION |
In deinem Programm ermittelst du die Nachbarknoten so, dass du von den 4 angrenzenden Zellen diejenigen auswählst, die nicht auf der Wand und nicht ausserhalb des Gitters liegen. Ein Vogel im Schwarm möchte einerseits seinen Nachbaren nahe sein, andererseits möchte er Kollisionen vermeiden. Sein Verhalten lässt sich mit folgenden Regeln beschreiben: 1. Separation: Jeder Actor hält einen gewissen Abstand zu den Nachbaren, um mögliche Kollisionen zu vermeiden. Der Beschleunigungsvektor des Akteurs ist entgegengesetzt zum Vektor der Summe der Positionen der Nachbarn. 2. Aligment: hat zum Ziel, die Geschwindigkeit und Richtung an die Bewegung der Nachbarn anzugleichen. Der Geschwindigkeitsvektor des Akteurs wird als Mittelwert der Geschwindigkeitsvektoren der Nachbarn gebildet. 3. Cohesion: hat zum Ziel, den Schwarm zusammenzuhalten und lässt den Akteur möglichst nahe beim Nachbarn bleiben. Die Richtung des Beschleunigungsvektors des Akteurs zeigt in Richtung des gemeinsamen Schwerpunktes der Punktmassen der Nachbarn. Programm: # Swarm.py from gamegrid import * import math import random class Tree(Actor): def __init__(self): Actor.__init__(self, "sprites/tree1.png") class Bird(Actor): def __init__(self): Actor.__init__(self, True, "sprites/arrow1.png") self.r = GGVector(0, 0) # Position self.v = GGVector(0, 0) # Velocity self.a = GGVector(0, 0) # Acceleration # Called when actor is added to gamegrid def reset(self): self.r.x=self.getX() self.r.y=self.getY() self.v.x=startVelocity*math.cos(math.radians(self.getDirection())) self.v.y=startVelocity*math.sin(math.radians(self.getDirection())) # ----------- cohesion --------------- def cohesion(self, distance): return self.getCenterOfMass(distance).sub(self.r) # ----------- alignment -------------- def alignment(self, distance): align = self.getAverageVelocity(distance) align = align.sub(self.v) return align # ----------- separation ------------- def separation(self, distance): repulse = GGVector() # ------ from birds ------ for p in birdPositions: dist = p.sub(self.r) d = dist.magnitude() if d < distance and d != 0: repulse = repulse.add(dist.mult((d-distance)/d)) # ------ from trees ------ trees = self.gameGrid.getActors(Tree) for actor in trees: p = GGVector(actor.getX(), actor.getY()) dist = p.sub(self.r) d = dist.magnitude() if d < distance and d != 0: repulse = repulse.add(dist.mult((d-distance)/d)) return repulse # ----------- wall interaction ------- def wallInteraction(self): width = self.gameGrid.getWidth() height = self.gameGrid.getHeight() acc = GGVector() if self.r.x < wallDist: distFactor = (wallDist - self.r.x) / wallDist acc = GGVector(wallWeight * distFactor, 0) if width - self.r.x < wallDist: distFactor = ((width - self.r.x)-wallDist)/wallDist acc = GGVector(wallWeight * distFactor, 0) if self.r.y < wallDist: distFactor = (wallDist - self.r.y) / wallDist acc = GGVector(0, wallWeight * distFactor) if height - self.r.y < wallDist: distFactor = ((height - self.r.y)-wallDist)/wallDist acc = GGVector(0, wallWeight * distFactor) return acc def getPosition(self): return self.r def getVelocity(self): return self.v def getCenterOfMass(self, distance): center = GGVector() sum = 0 for p in birdPositions: dist = p.sub(self.r) d = dist.magnitude() if d < distance: center = center.add(p) sum += 1 if sum != 0: return center.mult(1.0/sum) else: return center def getAverageVelocity(self, distance): avg = GGVector() sum = 0 for i in range(len(birdPositions)): p = birdPositions[i] if (self.r.x - p.x)*(self.r.x-p.x) + \ (self.r.y - p.y)*(self.r.y-p.y)<distance*distance: avg = avg.add(birdVelocities[i]); sum += 1 return avg.mult(1.0/sum) def limitSpeed(self): m = self.v.magnitude() if m < minSpeed: self.v = self.v.mult(minSpeed / m) if m > maxSpeed: self.v = self.v.mult(minSpeed / m) def setAcceleration(self): self.a = self.cohesion(cohDist).mult(cohWeight) self.a = self.a.add(self.separation(sepDist).mult(sepWeight)) self.a = self.a.add(self.alignment(aligDist).mult(aligWeight)) self.a = self.a.add(self.wallInteraction()) def act(self): self.setAcceleration() self.v = self.v.add(self.a) # new velocity self.limitSpeed() self.r = self.r.add(self.v) # new position self.setDirection(int(math.degrees(self.v.getDirection()))) self.setLocation(Location(int(self.r.x), int(self.r.y))) # global section def populateTrees(number): blockSize = 70 treesPerBlock = 10 for block in range(number // treesPerBlock): x = getRandomNumber(800 // blockSize) * blockSize y = getRandomNumber(600 // blockSize) * blockSize for t in range(treesPerBlock): dx = getRandomNumber(blockSize) dy = getRandomNumber(blockSize) addActor(Tree(), Location(x + dx, y + dy)) def generateBirds(number): for i in range(number): addActorNoRefresh(Bird(), getRandomLocation(), getRandomDirection()) onAct() # Initialize birdPositions, birdVelocities def onAct(): global birdPositions, birdVelocities # Update bird positions and velocities birdPositions = [] birdVelocities = [] for b in getActors(Bird): birdPositions.append(b.getPosition()) birdVelocities.append(b.getVelocity()) def getRandomNumber(limit): return random.randint(0, limit-1) # coupling constants cohDist = 100 cohWeight = 0.01 aligDist = 30 aligWeight = 1 sepDist = 30 sepWeight = 0.2 wallDist = 20 wallWeight = 2 maxSpeed = 20 minSpeed = 10 startVelocity = 10 numberTrees = 100 numberBirds = 50 birdPositions = [] birdVelocities = [] makeGameGrid(800, 600, 1, False) registerAct(onAct) setSimulationPeriod(10) setBgColor(Color.blue) setTitle("Swarm Simulation") show() populateTrees(numberTrees) generateBirds(numberBirds) doRun() |
ESPRESSO AUTOMAT |
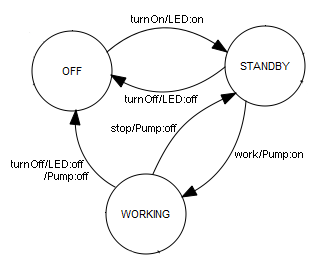
| Im täglichen Leben machst du Bekanntschaft mit vielen Geräten und Maschinen, die du als Automaten auffassen kannst. Dazu gehören Getränkeautomaten, Waschautomaten, Geldautomaten, usw. Als Ingenieur und Informatiker entwickelst du einen solchen Automaten mit der klaren Vorstellung, dass dieser ausgehend von einem aktuellen Zustand schrittweise in einen Nachfolgezustand übergeht, der von Sensordaten und der Betätigung von Tasten und Schaltern abhängt. |
Programm: #Espresso.py from gamegrid import * def pressEvent(e): global state loc = toLocationInGrid(e.getX(), e.getY()) if loc == Location(1, 2): # off state = "OFF" led.show(0) coffee.hide() elif loc == Location(2, 2): # on if state == "OFF": state = "STANDBY" led.show(1) elif loc == Location(4, 2): # stop if state == "WORKING": state = "STANDBY" coffee.hide() elif loc == Location(5, 2): # work if state == "STANDBY": state = "WORKING" coffee.show() setTitle("State: " + str(state)) refresh() state = "OFF" makeGameGrid(7, 11, 50, None, "sprites/espresso.png", False, mousePressed = pressEvent) show() setTitle("State: " + str(state)) led = Actor("sprites/lightout.gif", 2) addActor(led, Location(3, 3)) coffee = Actor("sprites/coffee.png") addActor(coffee, Location(3, 6)) coffee.hide() refresh() |
![]()